个人资料
个人简介王振,副教授,博士生导师,硕士生导师。先后入选中国科协青年托举人才、山东省泰山创新领军人才、陕西省三秦特支青年拔尖人才、陕西省青年科技新星。长期从事智能网联汽车高精度定位、轨迹规划与控制、整车在环测试等方面的理论研究和产业化应用。先后主持和参与多项国家重点研发计划项目、自然基金项目、陕西省重点研发项目,发表高水平SCI论文20余篇,获得授权发明专利30余项,其中美国发明专利3项,承担本科生教学课程10门次。 课题组简介: 课题组招收人工智能、自动驾驶、车路协同、计算机视觉、智能汽车方向的博士生和硕士生,课题组为研究生提供如下条件: 1. 一流的科研环境:优良的科研场地、配备计算机等基础科研条件; 2. 一流的设备设施:自动驾驶实车2辆、小比例自动驾驶车辆平台3辆、高性能计算机算力平台、自动驾驶整车在环测试大型装备(全国高校唯一)、多种自动驾驶传感器。 3. 每月发放科研劳务补助; 4. 全额资助论文发表,全额资助参加国内外学术会议; 5. 1对1的技术开发/论文写作指导; 6. 友好的科研和学习氛围,互帮互助,不定期团建; 7. 头部企业实习和内推机会; 课题组研究生就业情况: 2026届: 刘**,博世汽车部件(苏州)有限公司,雷达感知 AI 算法工程师,年薪35W+; 陈**,广州文远知行科技有限公司,系统测试工程师(国际),年薪40W+; 代*,深圳锐明科技,嵌入式软件开发工程师,年薪30W+; 课题组新闻: 2026.05:课题组论文被中科院一区TOP期刊Transportation Research Part E录用; 2026.05:课题组研究生获批中国发明专利1项; 2026.05:入选陕西省三秦特支青年拔尖人才; 2026.04:课题组研究生获批中国发明专利1项; 2026.02:课题组博士生论文被顶级国际会议ICRA录用; 2025.12:课题组研究生的论文被国际会议EILM录用; 2025.10:课题组研究生授权自动驾驶测试领域发明专利1项; 2025.09:课题组3位研究生的论文被国际会议ICEMCE录用; 2025.08:课题组研究成果荣获全球道路联合会(IRF Global)全球道路成就奖(GRAA); 2025.08:5位研究生申请的软件著作权获批授权; 2025.07:课题组研究生的论文被国际会议ACM International Conference on Multimedia录用(CCF-A); 2025.06:课题组研究生在IEEE Sensors Letters期刊发表论文《Efficient Critical Data Generation Framework for Vision Sensors of Autonomous Vehicle Perception System》; 2025.05:课题组研究生在IEEE Transactions on Intelligent Transportation Systems期刊发表论文(TOP期刊); 2025.05:课题组出版专著《自动驾驶整车在环测试评价理论与方法》; 2025.05:课题组研究生参加“挑战杯”学术作品竞赛,获陕西省二等奖; 2025.03:课题组获批美国发明专利1项; 2025.02:入选中国科协青年托举人才(长安大学年度唯一一项); 2024.11:课题组研究生在IEEE Transactions on Intelligent Transportation Systems期刊发表论文(TOP期刊); 2024.06:课题组研究生在Advanced Intelligent Systems期刊发表论文; 社会职务1. 编委任职 《AI and Autonomous Systems》期刊编委; 《汽车工程学报》期刊青年编委; 《International Journal of Environmental Research and Public Health》期刊Guest Editor; 2. 期刊审稿人 《Nature Communications》 《IEEE Transactions on Intelligent Transportation Systems》 《Transportation Research Part C Emerging Technologies》 《Expert Systems with Applications》 《Communications in Transportation Research》 《Transportation Research Part E: Logistics and Transportation Review》 《Automatica》 《IEEE Internet of Things Journal》 《IEEE Transactions on Vehicular Technology》 3. 会议审稿人 《AAAI - 26》 《TRB - 2025》 《IEEE Virtual Reality》 《International Joint Conference on Artificial Intelligence》 《IEEE International Conference on Robotics and Automation》 研究领域本人长期从事智能网联汽车定位、决策、规划与控制领域的研究,主持或参与多项国家级、省部级项目,公开发表高水平论文11篇,获得授权发明专利30余项,其中美国发明专利2项,软件著作权8项。 研究内容一:自动驾驶汽车高精度定位与控制 研究面向典型城市环境的自动驾驶汽车高精度定位技术,融合GNSS、IMU、Odom、Lidar等多源传感器。研究典型道路环境下自动驾驶汽车高精度运动控制技术。
研究内容二:智能网联汽车轨迹规划 本人近年来在智能网联汽车换道策略方面进行了较为深入的研究,提出了多种换道模型并在实车上进行了较为充分的验证。研究1探究了自动驾驶汽车在多辆人驾车辆的混合环境中进行换道的方法;所提出的换道模型考虑到了目标车道上人驾车辆可能出现配合/不配合换道的情况;采用智能驾驶员模型对人驾车辆的行车意图进行预判,然后以动态正弦曲线为载体进行换道轨迹规划;结合车辆动力学模型和模型预测控制方法进行轨迹跟踪控制;所提出的换道模型在试验场环境下进行了充分的实车实验验证。实验结果表明,所提出的换道模型可以很好地应对人驾车辆出现的配合/不配合换道情况;对比人工换道数据,在提高换道效率的同时提升了安全性和舒适性。
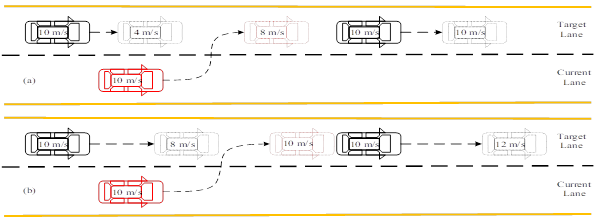
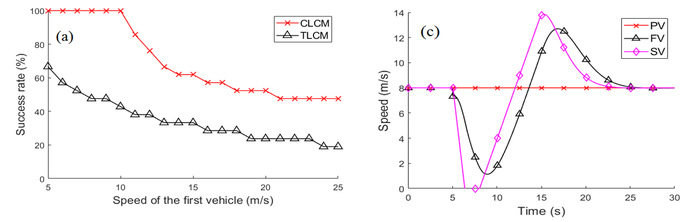
(a)换道研究示意图及实车试验航拍 (b) 模型与人驾车辆性能对比 图1 面向混合交通流的自动驾驶汽车换道模型 研究2针对多智能网联汽车协同换道策略进行研究,考虑到混合交通流中智能网联汽车存在不同的渗透率,针对多智能网联汽车渗透率较高的情况下车辆间协作换道方法展开研究:以车辆纵向动力学模型为基础,以安全性和舒适性为约束,以最小化对目标车道后方车辆的影响为目标构建出一种新的换道模型。所提出的模型在97461种场景中进行了测试,相比传统换道模型,所提出的协同式换道模型可以提高36.7%的换道成功率,并且大幅度减小了由车辆换道所引发的目标车道后方车辆队列的速度波动。
(a) 所提出的协同换道模型示意图(上:无协同换道;下:协同换道)
(b) 与无协同换道模型的量化对照(左:换道成功率;右:速度平顺性) 图2 多自动驾驶汽车协同换道模型 针对于驾驶员注意力机制及行为特性方面,研究3通过开展实车实验对驾驶员跟随自动驾驶汽车过程中的行为特征进行分析,进而揭示了不同驾驶员对于自动驾驶车辆的不同态度及反应机制。该项研究的实验数据进行了公开,已为多项研究提供了数据基础。
图3 分析驾驶员跟随自动驾驶汽车过程中的行为特征 研究内容三:智能网联汽车整车在环测试
以多自由度整车在环测试台架为基础,研究数字孪生测试场景构建方法、典型自动驾驶传感器模型、行为评价方法等。 欢迎有志于从事自动驾驶汽车、智能网联汽车相关理论和技术研究的同学报考本人研究生。 开授课程 《C/C++程序设计》《面向对象程序设计》《数据结构与算法》《自动驾驶技术及应用》
科研项目1.国家重点研发计划专题项目,120万,主持; 2.自然科学基金青年基金项目,30万,主持; 3.中国科协青年托举人才项目,30万,主持; 4.山东省泰山创新领军人才项目,主持; 5.陕西省重点研发计划项目,18万,主持; 6.陕西省创新能力支撑计划项目,10万,主持; 7.陕西省科协青年托举人才项目,主持; 8.中央高校基本科研业务费资助项目,高新技术研究培育项目,主持; 9.中央高校基本科研业务费资助项目,优秀博士毕业生项目,主持; 10.自动驾驶及其整车在环测试系统研发项目,180万,主持; 11.智能网联汽车运动控制域控制器研发项目,11万,主持; 12.陕西省留学人员科技活动择优资助项目,主持; 13.国家自然科学基金联合基金项目,254万,参与; 14.国家自然科学基金面上项目,参与; 教改项目: 1.教育部产学合作协同育人项目,主持; 论文SCI期刊论文: 1. Zhen Wang, Xiangmo Zhao, Zhigang Xu. Modelling and Field Experiments on Autonomous Vehicle Lane Changing with Surrounding Human-driven Vehicles [J]. Computer-aided Civil and Infrastructure Engineering, 2020,2:1-13. (SCI, TOP, IF:8.552) 2. Xiangmo Zhao, Zhen Wang, Zhigang Xu. Field Experiments on Longitudinal Characteristics of Human Driver Behavior Following an Autonomous Vehicle [J]. Transportation Research Part C-Emerging Technologies, 2020,114:205-224. (SCI, TOP, IF:6.077) 3. Zhen Wang*, Xiangmo Zhao, Zhigang Xu. Offline Mapping for Autonomous Vehicles with Low-cost Sensors [J]. Computers & Electrical Engineering, 2020,82:1-11. (SCI, IF:2.663) 4. Zhen Wang, Xiangmo Zhao, Zhiwei Chen. A Dynamic Cooperative Lane-Changing Model for Connected and Autonomous Vehicles with Possible Accelerations of a Preceding Vehicle [J]. Expert Systems with Applications, In Press. (SCI, TOP, IF:5.452) 5. Zhen Wang, Xiaowei Shi, Xiaopeng Li. Review of Lane-Changing Maneuvers of Connected and Automated Vehicles: Models, Algorithms and Traffic Impact Analyses [J]. Journal of the Indian Institute of Science, 2019, 99 (4): 589-599. (SCI, IF:0.742) 6. Zhigang Xu, Kaifan Zhang, Haigen Min, Zhen Wang. What Drives People to Accept Automated Vehicles? Findings from a Field Experiment [J]. Transportation Research Part C-Emerging Technologies, 2018,95:320-334. (SCI, TOP, IF:6.077) 7. Zhen Wang, Xiaowei Shi*, Xiangmo Zhao, Xiaopeng Li. Modelling Decentralised Mandatory Lane Change for Connected and Autonomous Vehicles: An Analytical Method [J]. Transportation Research Part C-Emerging Technologies, (SCI, TOP, IF:6.077) 8. Shi, Xiaowei, Zhen Wang, Xiaopeng Li, Mingyang Pei. The Effect of Ride Experience on Changing Opinions Toward Autonomous Vehicle Safety [J]. Communications in Transportation Research, 2021. (SCI, TOP) 9. Cheng, Jingjun, Zhen Wang*, Xiangmo Zhao, Zhigang Xu, Ming Ding, Kazuya Takeda. A Survey on Testbench‐Based Vehicle‐in‐the‐Loop Simulation Testing for Autonomous Vehicles: Architecture, Principle, and Equipment [J]. Advanced Intelligent Systems, 6, no. 6 (2024): 2300778. 10. Sheng, Xing, Jun-Zhe Zhang, Zhen Wang*, Zong-Tao Duan. EdgeUNet: Edge-Guided Multi-Loss Network for Drivable Area and Lane Segmentation in Autonomous Vehicles [J]. IEEE Transactions on Intelligent Transportation Systems (2024). 11. Sheng, Xing, Jun-Zhe Zhang, Zhen Wang*, Zong-Tao Duan. Driving Behavior Classification Method Based on Fourier Transformer Multimodal Fusion [J]. IEEE Transactions on Intelligent Transportation Systems, 2025. (SCI, TOP) 12. Cheng Peng, Yichun Su, Zhen Wang*, Xiangmo Zhao, Xiaopeng Li. Efficient Critical Data Generation Framework for Vision Sensors of Autonomous Vehicle Perception System [J]. IEEE Sensors Letters, 2025. 会议论文: 1. Xue, Dingrui, Jingjun Cheng, Xiangmo Zhao, Zhen Wang*. A Vehicle-in-the-Loop Simulation Test Based Digital-Twin for Intelligent Vehicles. In 2021 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), pp. 918-922. IEEE, 2021. 2. Xue, Dingrui, Nan Yang, Xiangmo Zhao, Zhen Wang*. Point-Cloud Map Update for Connected and Autonomous Vehicles Based on Vehicle Infrastructure Cooperation: Framework and Field Experiments. In 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), pp. 2062-2067. IEEE, 2021. 3. Lin, Yuqing, Zhen Wang*, Xiangmo Zhao, Dingrui Xue. Multimodal Fusion Framework: Comprehensive Information Utilization and Performance Optimization in Driver Style Classification. In International Conference on Optics, Electronics, and Communication Engineering (OECE 2024), vol. 13395, pp. 286-294. SPIE, 2024. 4. Kuang, Ruimin, Fei Hui, Ruiyu Hou, Zhen Wang*. Vertical Parking Control and Optimization Method Based on MPC. In CICTP 2024, pp. 554-563. 2024. 5. Hou, Ruiyu, Fei Hui, Ruimin Kuang, Zhen Wang*. Adaptive Cruise Control Strategy Considering Millimeter-Wave Radar Error Correction in Rainfall Weather Conditions. In CICTP 2024, pp. 74-84. 2024. 专著: 1.《自动驾驶整车在环测试评价理论与方法》,科学出版社,2025. 科技成果发明专利(部分): 1.一种基于多线激光雷达的车辆运动轨迹估计方法及系统,CN109166140B,已成果转化至陕重汽; 2.美国发明专利,System for Testing Intelligent Vehicles, US12241807 B2; 3.美国发明专利,Method for Internet of Vehicles Electric Traffic Sign Information Broadcast with Quality of Service Guaranteed Mechanism Based on Conflict Detection; 4.美国发明专利,Simulation Test Method Based on a Rotating Prism LiDAR and a Device Thereof; 5.一种用于车辆测试的驾驶机器人系统及控制方法,CN109491364B; 6.一种汽车车载传感器故障自动检测方法及装置,CN109031251A; 7.一种智能汽车的测试系统,CN112526893A; 8.一种基于整车在环的CACC稳定性测试系统及方法,CN112255996B; 9.基于台架测试无人车智能性的方法,CN109084992B; 10.一种基于真实交通数据的自动驾驶测试场景库构建方法; 11.一种用于自动驾驶测试的危险场景泛化生成方法; 124..一种基于大语言模型的自动驾驶全景测试场景生成系统; 13.一种基于大语言模型的自动驾驶临界场景闭环生成方法; 14.一种拟人化的虚拟测试场景多背景车协同决策方法; 15.一种多视角感知驱动的自动驾驶测试场景孪生重建方法; 16.一种用于自动驾驶虚实融合测试的毫米波雷达建模方法及装置; 17.自动驾驶测试故障用例自动生成方法及车辆综合评价方法; 18.一种基于多模态融合的驾驶行为分类的方法和装置; 19.一种文本到动态三维场景的生成方法和装置; 20.一种驾驶分心检测模型及方法; 标准: 1. 陕西省汽车工程学会.自动驾驶车辆整车在环测试系统技术要求、测试流程及方法; 软件著作权(部分): 1.自动驾驶整车在环测试数字孪生软件; 2.自动驾驶车辆数据采集及回放分析软件; 3.面向自动驾驶换道的临近车辆行为分类软件; 4.驾驶员在环的自动驾驶换道功能测试软件; 5.自动驾驶强化学习换道软件; 6.自动驾驶车辆集群远程监控调度软件; 7.无人驾驶汽车CAN控制软件; 8.无人驾驶智能汽车3D显示及整体控制软件; 9.无人驾驶汽车电子地图编辑软件; 10.无人驾驶汽车电子地图编辑软件; 11.车联网环境下基于多源数据的智能网联汽车换道规划软件; 12.基于车联网和车路协同的车辆队列行驶控制软件; 13.车道线检测与辅助驾驶软件; 14.整车在环测试系统管理软件; 15.面向自动驾驶测试的组合导航信号生成与注入暗箱控制软件; 16.面向自动驾驶轨迹规划的矢量地图编辑软件; 17.面向自动驾驶测试的虚拟场景生成软件; 荣誉奖励个人荣誉奖励: 1. 2025,荣获2025全球道路成就奖; 2. 2025,入选中国科协青年托举人才(长安大学年度唯一一项); 3. 2024,入选陕西省创新人才攀登工程“青年科技新星”; 4. 2023,入选山东省泰山创新领军人才(山东省最高人才奖励); 5. 2022,入选陕西省科协青年托举人才; 6. 2022,《Communications in Transportation Research》年度最佳论文奖励; 7. 2022,中国公路学会全国优秀博士学位论文奖励; 8. 2023,长安大学优秀本科毕业设计指导教师; 9. 2023,长安大学优秀本科生班主任; 指导学生荣誉奖励: 2025年: 1.第十五届“挑战杯”陕西省大学生课外学术作品竞赛,陕西省二等奖; 2.第二十届中国研究生电子设计竞赛,商业计划书专项赛陕西省团队一等奖; 3.全国大学生数字媒体科技作品及创意竞赛,长安大学一等奖; 2024年: 1.长安大学“挑战杯”大学生创业计划竞赛金奖; 2.第十九届中国研究生电子设计竞赛优秀指导教师; 3.第十二届“挑战杯”陕西省大学生创业计划竞赛银奖; 4.第十九届中国研究生电子设计竞赛,商业计划书专项赛陕西省团队一等奖; 2023年: 1.中国大学生工程实践与创新能力大赛全国金奖; 2.中国大学生工程实践与创新能力大赛陕西赛区一等奖; 3.中国大学生计算机设计大赛西北赛区二等奖; 4.长安大学第九届中国国家“互联网+”大学生创新创业大赛金奖; 5.第十八届中国研究生电子设计竞赛西北赛区团队二等奖; 2022年: 1.第十一届“挑战杯”陕西省大学生创业计划竞赛铜奖; 2021年: 1.第十六届研究生电子设计竞赛西北赛区团队二等奖; 工作经历2025.04 - 至今:长安大学,信息工程学院,软件工程系副主任 2020.09 - 至今:长安大学,信息工程学院,副教授 |