个人资料
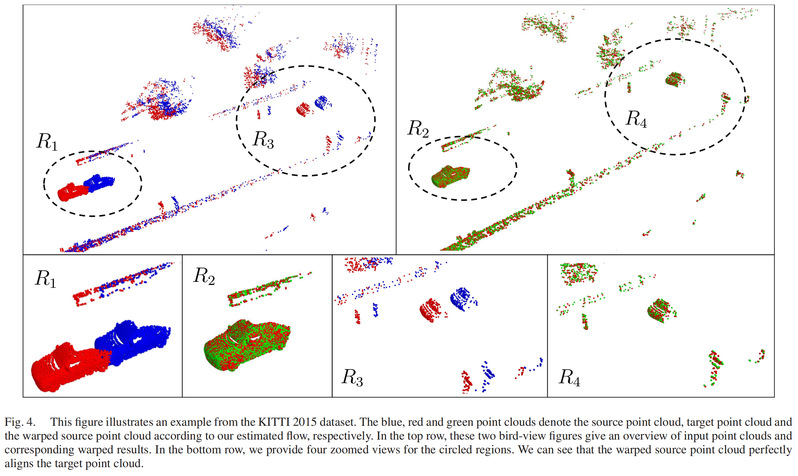
个人简介王珂,博士,硕士生导师,毕业于香港科技大学机器人所,导师为沈劭劼教授,现担任长安大学信息工程学院专任教师,合作导师为安毅生教授。于2023年获批海外青年人才引进计划*****项目。长期从事具身智能、智能车自主环境感知、视觉深度估计、车路协同感知等方面的研究工作。 社会职务担任机器人国际顶会IEEE ICRA副编辑(AE) ICRA/IROS/RAL/TIM等会议期刊长期审稿人 交通运输协会青年委员会委员 世界交通运输大会技术委员会委员 研究领域研究领域: 车路协同感知、智能车(机器人)自主环境感知、神经辐射场、视觉深度估计、动态场景信息捕捉 部分研究成果: 1. 基于LiDAR和IMU融合的高精度实时定位与建图(SLAM) 智能车(机器车)同时定位与建图技术,是智能车在未知环境完成特定任务的关键基础。此视频展示了智能车从长安大学北门体育场出发,绕学校主环道一圈,完成实时点云构图。为了便于可视化右侧(局部地图)视角升高,视频左下角图示实时定位建图鸟瞰图(BEV),左上角为车辆第一视角,蓝色线条为车辆自定位轨迹。其中1分46秒进入信息学院彩虹桥。 2. 基于车路协同的车辆全局定位 在全球卫星导航信号(GNSS)拒制环境下,车辆难以实现高效全局定位,进而无法获取自身在地球坐标系(如高德地图)下的位置,通过同时考虑路侧传感信息与车侧局部定位信息,可以实现车辆的全场景全局定位。此视频展示了智能车在长安大学自动驾驶封闭测试的视频。绿色线条为车辆真值轨迹,青色线条为车辆自定位轨迹,可以看出在车辆进入路侧辅助区域(无线标号区域)时,车辆自定位坐标系和全局坐标系对齐。 3. 基于RGB-D相机的语义目标级同时定位与建图 受益于深度学习技术的快速发展,机器人在未知环境在实时自定位的同时,可以实现对周围环境的语义建图,其难点在于(1)未知环境中的目标具有多样性,而常规深度学习模型存在识别目标已知;(2)因为部分观测等原因,时序语义识别结果存在非一致性,即上一时刻的椅子在下一时刻可能变为桌子;(3)一般深度学习模型存在跨数据域性能快速退化的问题。此研究工作结合大模型与贝叶斯推导,实现同一个模型对未知应用场景的定位与语义建图。 4. 基于点云数据的场景流估计 场景流估计技术是指从两个点云场景中估计场景运动的技术。由于场景流具有相互独立的特性,可以用来处理复杂动态场景中的感知问题。精确的场景流可以提高智能车轨迹规划、障碍物规避、虚拟现实等技术的性能。下图图示了自动驾驶场景两个相邻时刻点云帧之间的场景流估计结果。
5. 基于卷帘相机对的双目深度估计 双目深度估计方法大多基于全局快门相机,较少研究如何从卷帘快门相机中估计深度。此视频展示了基于卷帘相机的瞬时双目深度估计方法。 开授课程授课列表
指导研究生
科研项目部分项目
论文[R15] Ke Wang, Yaohui Feng, Bingcao Wu, Zhanwen Liu, Yisheng An and Shaojie Shen. Depth Estimation using Short-Long Focal Binocular Cameras, in IEEE Robotics and Automation Letters, under review. [R14] Lei Shi, Ke Wang, Zhanwen Liu, Shuai Ren and Weiping Ding. A Cross-View Object Matching Framework for Vehicle-Infrastructure Collaboration Based on Topological Scene Representation, in IEEE Transactions on Intelligent Transportation Systems, under review. [R13] Long Min, Yaohui Feng, Ke Wang*, Bingcao Wu, Chuhao Liu and Shaojie Shen. Loop Closure Detection: A Viewpoint Invariant BEV Scene Representation for RGB-D based SLAM, 2026 IEEE International Conference on Robotics and Automation (ICRA), under review. [R12] Yueyang Ding, Ke Wang*, Xuelian Liu, Zhanwen Liu and Chunyang Wang. Gravity Vector Guided Targetless Extrinsic Calibration between LiDAR and Camera, in IEEE Robotics and Automation Letters, under review. [R11] Binfang Zhang, Ke Wang*, Chenxi Wu, Zhukai Wang and Zhanwen Liu. Virtual-Real Fusion Testing for Autonomous Driving Based on AR + VI-SLAM, in Communications in Computer and Information Science, 2025. [R10] Chuhao Liu, Zhijian Qiao, Jieqi Shi, Ke Wang, Peize Liu and Shaojie Shen, SG-Reg: Generalizable and Efficient Scene Graph Registration, IEEE Transactions on Robotics (T-RO) , 2025 [R9] Lei Shi, Shuai Ren, Xing Fan, Ke Wang, Shan Lin and Zhanwen Liu, Modified You Only Look Once Network Model for Enhanced Traffic Scene Detection Performance for Small Targets, IET Image Processing, 2025 [R8] Di Wang, Fei Ge, Ke Wang*, Hui Chen, Wenwen Jia, Xuelian Liu and Zhanwen Liu, Vehicle Global Localization Based on V2I Collaboration in GNSS-Denied Environments, in proceeding of the 4th International Conference on Intelligent Traffic Systems and Smart City, Augest 2024 [R7] Ke Wang, Chuhao Liu, Zhanwen Liu, Fangwei Xiao, Yisheng An, Xiangmo Zhao and Shaojie Shen, Multi-View Depth Estimation By Using Adaptive Point Graph to Fuse Single-View Depth Probabilities, in IEEE Robotics and Automation Letters, June 2024. [R6] Chuhao Liu, Ke Wang*, Jieqi Shi, Zhijian Qiao and Shaojie Shen. FM-Fusion: Instance-Aware Semantic Mapping Boosted by Vision-Language Foundation Models, in IEEE Robotics and Automation Letters, 9(3): 2232-2239. January 2024. [R5] Ke Wang and Shaojie Shen, Estimation and Propagation: Scene Flow Prediction on Occluded Point Clouds, in IEEE Robotics and Automation Letters, vol.7, no.4, pp.12201-12208, October 2022. [R4] Ke Wang, Chuhao Liu and Shaojie Shen. Geometric Calibration for Cameras with Inconsistent Imaging Capabilities”, Sensors vol. 22, no.7: 2739, April 2022 [R3] Ke Wang and Shaojie Shen, “Semi-Supervised Learning: Structure, Reflectance and Lighting Estimation From a Night Image Pair”, in IEEE Robotics and Automation Letters, vol.7, no.2, pp. 976-983, December 2021. [R2] Ke Wang, Chuhao Liu, Kaixuan Wang and Shaojie Shen. “Depth Estimation Under Motion With Single Pair Rolling Shutter Stereo Images”, in IEEE Robotics and Automation Letters, vol.6, no.2, pp.3160-3167, March 2021. [R1] Ke Wang, Kaixuan Wang and Shaojie Shen. FlowNorm: A Learning-based Method for Increasing Convergence Range of Direct Alignment, 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, May 2020, pp. 2109-2115, doi: 10.1109/ICRA40945.2020.9197118. 科技成果部分科技成果 [R5] 王珂,冯耀辉,闽龙,刘占文,安毅生 长短焦相机组的场景深度图估计模型的构建及估计方法,国家发明专利, 2025年5月. R[4] Xiang Liu, Ke Wang and Xiaoping Hong. Object measurement for light detection and ranging system, U.S. Patent , US 2020/0142039,May 7, 2020. (美国专利) [R3] Ke Wang, Qiang Zhang, Wei Tuo , Taiwen Liang. Systems and methods for memory architecture, U.S. Patent , US 10,635,633 B2, April 28, 2020. (美国专利) [R2] Ke Wang, Chenghui Long and Xiaoping Hong. Angle calibration in light detection and ranging system, U.S. Patent , US 10,295,659, May 21, 2019. (美国专利) [R1] Wei Tuo, Qiang Zhang, Zhiwei Liu, Ke Wang. Method and System for Storing images, WIPO. Patent , WO2018/006393A1, January 11, 2018. (国际专利) 荣誉奖励部分奖项: [R9] 指导教师,陕西省2024团体程序设计天梯赛省级一等奖,中国高校计算机大赛, 2024 [R8] 指导教师(1/3), 第九届中国国际互联网+大学生创新创业大赛校级银奖,长安大学, 2023 [R7] 参与人(3/3), 陕西省第一届研究生电子设计竞赛暨全国第九届研究生电子设计竞赛西北赛区选拔赛团体二等奖, 教育部学位与研究生教育发展中心、全国工程专业学位研究生教育指导委员会和中国电子学会联合, 2014 (省部级竞赛奖项) [R6] 参与人(3/3), 第五届“翱翔杯”研究生电子设计竞赛团体一等奖, 西北工业大学研究生院, 2014 [R5] 参与人(8/9), 中国机器人大赛暨RoboCup公开赛双足竞步机器人体操大学组项目国家二等奖, 中国自动化学会机器人竞赛委员会、RoboCup中国委员会和科技部高技术研究发展中心, 2012 (国家级竞赛奖项) [R4] 参与人(5/20), 中国机器人大赛暨RoboCup公开赛仿人机器人竞速比赛障碍赛项目国家二等奖, 中国自动化学会机器人竞赛委员会、RoboCup中国委员会和科技部高技术研究发展中心, 2012 (国家级竞赛奖项) [R3] 参与人(2/3), 中俄工科大学联盟大学生机器人创新大赛-舞蹈类单人舞项目第三名, 中俄工科大学工科大学联盟, 2011 (国际级竞赛奖项) [R2] 参与人(5/17),中国机器人大赛暨RoboCup公开赛舞蹈机器人大学组无差别组项目比赛一等奖, 中国自动化学会机器人竞赛委员会、RoboCup中国委员会和科技部高技术研究发展中心, 2011 (国家级竞赛奖项) [R1] 参与人(2/6), 中国机器人大赛暨RoboCup公开赛仿人机器人竞速项目比赛三等奖, 中国自动化学会机器人竞赛委员会、RoboCup中国委员会和科技部高技术研究发展中心, 2011 (国家级竞赛奖项) 工作经历2025.06-今 长安大学 信息工程学院 软件工程系副主任 2023.03-今 长安大学 信息工程学院 专任教师 2016.11-2018.01 深圳大疆创新科技有限公司 激光雷达组 算法工程师 2014.09-2016.11 深圳大疆创新科技有限公司 相机部 系统工程师 |