个人资料
个人简介朱旭,男,副教授,博士生导师、硕士生导师,“控制科学与工程”学科建设责任教授,中国仿真学会会员、中国公路学会会员。主要从事无人机编队控制、飞行控制、导航控制、空地异构编队的协同控制、智能测控软件开发、智能网联车辆队列控制与稳定性分析等方面的研究工作。主持国家自然科学基金1项、陕西省重点研发计划2项、陕西省自然科学基础研究计划1项、中国博士后科学基金1项、西安市科技计划2项、中央高校基本科研业务费2项,以及多项横向课题。获陕西省高等教育教学成果奖二等奖1项。在国内外重要期刊上发表学术论文20余篇,其中SCI检索7篇,EI检索16篇,获授权发明专利10项,软件著作权6项。 在工程项目方面,具有十余年的软件工程开发经验,带领课题组完成过多项大型软件项目的研发。擅长大数据、云服务平台开发及各类C/S架构、B/S架构设计,精通C、C++、C#、Java、Android、Python等编程语言。 所指导的研究生主要就业于科研院所、大型国企、银行软件研发中心、互联网头部企业,包括中国航天科技集团第16研究所、中国航空工业第631研究所(西安航空计算技术研究所)、中国航空工业陕西飞机工业有限公司、中国电子科技集团第20研究所、中国电子科技集团第38研究所、中国邮政储蓄银行软件研发中心、中国工商银行软件开发中心、百度等。 博士研究生招生专业:“智能控制理论与工程”二级博士点(工学博士)、“交通信息工程及控制”二级博士点(工学博士)、交通运输(工程博士)。 硕士研究生招生专业:控制科学与工程(学硕)、交通信息工程及控制(学硕)、电子信息(专硕)、交通运输(专硕)。 联系方式QQ:121766693 邮箱:zx@chd.edu.cn 社会职务“控制科学与工程”学科建设责任教授; 中国仿真学会会员; 中国公路学会会员; 《Nonlinear Dynamics》审稿专家; 《International Journal of Automotive Technology》审稿专家; 《International Journal of Control》审稿专家; 《Journal of Traffic and Transportation Engineering (English Edition)》审稿专家; 《控制与决策》审稿专家; 《交通运输工程学报》审稿专家; 《上海交通大学学报》审稿专家; 《浙江大学学报》审稿专家; 《吉林大学学报》审稿专家; 《北京交通大学学报》审稿专家。 研究领域研究方向: 1)无人机编队控制、飞行控制、导航控制; 2)空地异构编队的协同控制; 3)智能测控软件开发; 4)智能网联车辆队列控制与稳定性分析。
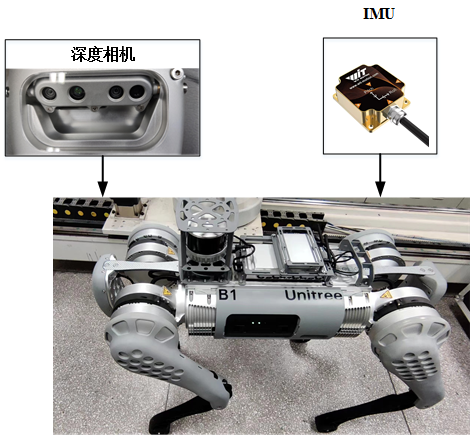
基于机器狗平台的土工膜渗漏点智能检测 博士招生方向:智能控制理论与工程(工学博士)、交通信息工程及控制(工学博士)、交通运输(工程博士)。 硕士招生方向:控制科学与工程(学硕)、交通信息工程及控制(学硕)、电子信息(专硕)、交通运输(专硕)。 开授课程本科课程: 《自动控制原理》; 《现代控制理论》; 《先进控制技术》; 《控制工程基础》; 《创业基本功与精益创业方法论》。 录制《现代控制理论》MOOC,已在智慧树、中国MOOC上线。 出版《现代控制理论数字课程》。 研究生课程: 《智能控制理论》。 录制《线性系统理论》MOOC,已在智慧树上线。 出版研究生教材《线性系统理论》。
科研项目[1] 国家自然科学基金青年项目,基于完全稳定性机理的多时滞空地机器人系统精准快速趋同控制研究,2021.1-2023.12,主持。 [2] 陕西省重点研发计划项目,智能网联车辆低渗透率情况下混合车辆队列协同控制与实验测试,2023.1-2024.12,主持。 [3] 陕西省重点研发计划项目,雨雾天气下高速公路智能化限速调控关键技术研究及系统开发,2020.1-2021.12,主持。 [4] 陕西省自然科学基础研究计划项目,基于弱通信情况下一致性的混合无人机/无人车刚体编队控制研究,2017.1-2018.12,主持。 [5] 中国博士后科学基金面上项目,具有不确定时延的空地异构机器人刚体编队控制研究,2017.1-2018.12,主持。 [6] 浙江长三角军民协同创新研究院军民融合项目,碳纤维地效翼船飞行控制系统研发,2022.3-2025.2,主持。 [7] 西安市科技计划项目,基于广域物联网的设施农业区数据采集与云服务平台研究及开发,2018.6-2020.6,主持。 [8] 西安市科技计划项目,基于物联网的农业示范区自动化数据采集与计算服务系统研究及开发,2015.1-2016.12,主持。 [9] 中央高校基本科研业务费基础研究项目,基于协同信息精确收敛的多时滞空地机器人编队控制研究,2020.1-2021.12,主持。 [10] 中央高校基本科研业务费基础研究项目,基于信息一致性的无人机近距编队队形保持技术研究,2016.1-2017.12,主持。 [11] 横向项目,面向柔性防渗结构自动化渗漏探测的四足机器人控制系统,2023.5-2024.2,主持。 [12] 横向项目,硅锭金刚线多线切割设备视觉检测与集中管理,2023.7-2024.2,主持。 [13] “十四五”国家重点研发计划项目,课题三“复杂交通流态势演化机理与优化控制研究”,2021.12-2026.11,参加。 [14] 陕西省重点研发计划项目,智能网联车辆队列的协同控制与实验测试方法,2019.1-2021.12,参加。 [15] 横向项目,XX多类型一体化卫星通信管控系统,2016.6-2022.12,参加。 [16] 横向项目,XX综合信息处理平台,2019.4-2019.6,参加。 [17] 横向项目,XX操控软件应用开发,2017.2-2018.12,参加。 论文论文: [1] Shen Yongming, Zhu Xu*, Yan Maode, et al. Most exigent eigenvalue problem for the stability analysis of the vehicle platoon with delay[J]. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(8): 12267-12286. (中科院SCI一区Top期刊, 国际交通领域顶级期刊) [2] 朱旭, 张逊逊, 尤谨语, 等. 基于信息一致性的无人机紧密编队集结控制[J]. 航空学报, 2015, 36(12): 3909-3919. (EI, 国内航空领域顶级期刊) [3] Zhu Xu, Zhang Xunxun, Yan Maode, et al. Three-dimensional multiple unmanned aerial vehicles formation control strategy based on second-order consensus[J]. Proceedings of the Institution of Mechanical Engineers - Part G: Journal of Aerospace Engineering, 2018, 232(3): 481-491. (SCI, 国际航空领域著名期刊) [4] 朱旭, 张琳虎, 闫茂德. 基于多时滞PR控制器的异构车辆队列系统设计[J]. 交通运输工程学报, 2024, 24(6): 230-242. (EI, 国内交通领域顶级期刊) [5] 朱旭, 孙卓, 张泽华, 等. 考虑3种时延的车辆队列控制系统稳定性[J]. 交通运输工程学报, 2024, 24(2): 254-266. (EI, 国内交通领域顶级期刊) [6] 朱旭, 张泽华, 闫茂德. 含输入时延与通信时延的车辆队列PID控制系统稳定性[J]. 交通运输工程学报, 2022, 22(3): 184-198. (EI, 国内交通领域顶级期刊) [7] 朱旭, 闫建国, 屈耀红. 高阶多智能体系统的一致性分析[J]. 电子学报, 2012, 40(12): 2466-2471. (EI, 国内电子领域顶级期刊) [8] Zhu Xu, Liang Yufei, Yan Maode. Computation of the exact time delay margin for vehicle platoon under generic communication topologies[J]. Journal of Traffic and Transportation Engineering (English Edition), 2024, 11(4): 761-775. (ESCI) [9] Zhu Xu, Shen Yongming, Yan Maode. Stability analysis of the vehicular platoon with sensing delay and communication delay: CTCR paradigm via Dixon resultant[J]. Applied Sciences-basel, 2023, 13: 11807. (SCI) [10] Zhu Xu, Liang Yufei, Yan Maode. A flexible collision avoidance strategy for the formation of multiple unmanned aerial vehicles[J]. IEEE Access, 2019, 7: 140743-140754. (SCI) [11] Zhu Xu, Zhang Xunxun, Yan Maode, Qu Yaohong. Three-dimensional formation keeping of multi-UAV based on consensus[J]. Journal of Central South University, 2017. 24(6): 1387-1395. (SCI) [12] Zhu Xu, Yan Jianguo, Qu Yaohong. Distributed consensus algorithm for networked Euler-Lagrange systems with self-delays and uncertainties[J]. Systems Engineering and Electronics, 2012, 23(12): 898-905. (SCI) [13] Zhu Xu, Zhang Zehua. Distributed PID controller design and stability analysis for the vehicle platoon with communication delay and input delay[C]. The 40th Chinese Control Conference, Shanghai, China, 2021: 950-955. (EI) [14] 朱旭, 闫建国, 屈耀红. 不同延迟下离散多智能体系统的一致性[J]. 电子与信息学报, 2012, 36(6): 1516-1520. (EI) [15] 沈永明, 朱旭*, 闫茂德. 关于时滞车辆队列闭环稳定性的最紧要特征值[J]. 哈尔滨工业大学学报, 2025, 57(4): 40-51. (EI) [16] 朱旭, 闫茂德, 张昌利, 等. 基于改进人工势场的无人机编队防碰撞控制方法[J]. 哈尔滨工程大学学报, 2017, 38(6): 961-968. (EI) [17] 朱旭, 魏婧, 张琳虎, 等. 比例-时滞控制器作用下自主车辆队列系统的最右侧极点配置方法[J]. 北京交通大学学报, 2023, 47(3): 52-60. (中国高质量科技期刊T1) [18] 朱旭, 王鹏, 左磊, 等. 改进预设性能的车辆队列滑模控制方法研究[J]. 大连交通大学学报, 2022, 43(6): 98-103. (中国高质量科技期刊T2) [19] Zhu Xu, Yan Jianguo, Qu Yaohong. Consensus problems for high-order multi-agent systems[C]. International Conference on MEMS, NANO and Smart Systems, Hefei, China, 2011: 59-62. (EI) [20] Yan Maode, Zhu Xu*, Zhang Xunxun, et al. Consensus based three-dimensional multi-UAV formation control strategy with high precision[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(7): 968-977. (SCI) [21] Zhu Xu, Zhang Zehua. Distributed PID controller design and stability analysis for the vehicle platoon with communication delay and Input delay[C]. The 40th Chinese Control Conference, Shanghai, China, 2021: 950-955. (EI) [22] Wei Jie, Zhu Xu*, Shen Yongming. Assignment of rightmost pole in vehicle platoon based on proportional-retarded controller[C]. The 43th Chinese Control Conference, Kunming, China, 2024: 6445-6450. (EI) [23] Shen Yongming, Zhu Xu*. A fast computation method of the exact delay margin for the second-order vehicle platoon stability analysis[C]. The 42th Chinese Control Conference, Tianjin, China, 2023: 1033-1038. (EI) [24] Shen Yongming, Zhu Xu*. Stability analysis for vehicle platoon with time delay under the TPLF topology[C], The 9th International Conference on Mechanical and Electronics Engineering, Xi'an, China, 2023: 271-276. (EI) [25] Zhang Zehua, Zhu Xu*. Internal stability and string stability analysis for vehicle platoon with time delays via the distributed PID controller[C]. The 41th Chinese Control Conference, Hefei, China, 2022: 49-54. (EI) [26] Qu Yaohong, Zhu Xu, Zhang Youmin.Cooperative control for UAV formation flight based on decentralized consensus algorithm[C]. International Conference on Intelligent Robotics and Applications, 2012: 357-366. (EI) 著作: [1] 闫茂德, 胡延苏, 朱旭. 2018, 线性系统理论[M]. 西安: 西安电子科技大学出版社. 科技成果发明专利: [1] 朱旭, 张泽华, 梁宇飞, 等. 一种适用于任意通信拓扑的含时滞车辆队列稳定性控制方法及系统, 授权专利号: ZL202110921297.5, 中国. [2] 朱旭, 赵文杰, 梁宇飞, 等.一种考虑通信时滞的异构车辆队列稳定性控制方法及系统, 授权专利号: ZL202110920053.5, 中国. [3] 朱旭, 贾骏, 闫茂德, 等. 一种基于无人机航拍图像的桥梁车辆检测方法, 授权专利号: ZL201910344879.4, 中国. [4] 朱旭, 梁宇飞, 闫茂德, 等.一种智能网联车辆编队的多时延稳定性分析方法, 授权专利号: ZL201811204184.8, 中国. [5] 朱旭, 杨安博, 闫茂德, 等. 一种高速公路团雾监测方法, 授权专利号: ZL201910828720.X, 中国. [6] 朱旭, 张倩楠, 徐伟, 等. 一种基于驾驶员行为的运动车辆状态预测方法, 授权专利号: ZL201811203402.6, 中国. (已转让) [7] 朱旭, 孙思琦, 徐伟, 等. 一种基于无人机航拍视频的运动车辆检测方法, 授权专利号: ZL201811203391.1, 中国. (已转让) [8] 朱旭, 任旭东, 徐伟, 等. 一种基于猫群优化和免疫模糊PID的孵化室温度控制方法, 授权专利号: ZL201811482290.2, 中国. (已转让) [9] 闫茂德, 朱旭, 周小强, 等. 一种无人机-无人车联合编队协同控制方法, 授权专利号: ZL201610459945.9, 中国. (已转让) [10] 闫茂德, 徐伟, 朱旭, 等. 一种智能识别圆形交通信号灯状态的方法, 授权专利号: ZL201810126429.3, 中国. (已转让) 软件著作权: [1] 朱旭, 李超飞, 闫茂德, 等. 基于广域物联网的设施农业区数据采集软件[P]. 中国软件著作权, 2018SR848306, 2018年10月. [2] 朱旭, 周小强, 闫茂德, 等. 农田试验田手持式数据采集上位机软件[P]. 中国软件著作权, 2016SR1679256, 2016年7月. [3] 朱旭, 张昌利, 闫茂德, 等. 农田试验田手持式数据采集上位机软件[P]. 中国软件著作权, 2016SR1679256, 2016年7月. [4] 朱旭, 张昌利, 闫茂德, 等. 交通道路气象采集与凝冰处置系统[P]. 中国软件著作权, 2016SR072197, 2016年4月. [5] 朱旭, 张昌利, 闫茂德, 等. 高速公路凝冰预警与智能融雪处置系统[P]. 中国软件著作权, 2015SR167469, 2015年8月. 荣誉奖励[1] 2019年获陕西省高等教育教学成果奖二等奖,排名第六。 [2] 2019年在陕西省自动化专业本科优秀毕业设计(论文)大赛中获优秀工作者。 [3] 2017-2018年获长安大学优秀本科班主任。 [4] 2016年指导大学生参加“建行杯”第二届中国“互联网+”大学生创新创业大赛获陕西赛区二等奖。 [5] 2015年指导大学生参加“飞思卡尔杯”第十届全国大学生智能车竞赛获全国二等奖,个人获优秀指导教师。 工作经历2014.09-2017.11 长安大学电子与控制工程学院 讲师; 2017.12-至今 长安大学电子与控制工程学院 副教授。 |