个人资料
个人简介男,中共党员,教授,博士生导师。世界交通运输大会(World Transport Convention,WTC)车联网委员会委员,陕西省创新驱动共同体自动驾驶专委会秘书,《中国公路学报》交通工程方向青年编委,《无人系统技术》期刊青年编委;荣获陕西省2019年高等教育教学成果奖“特等奖”;指导学生参加中国研究生电子设计竞、大学生物联网设计竞赛获、“挑战杯”、“互联网+”、中国智能车未来挑战赛(IFVC)、世界智能驾驶挑战赛(WIDC)、中国智能汽车大赛(CIVC)、i-VISTA自动驾驶汽车挑战赛等竞赛荣获国家及省级奖励20余项;获得“CICTP 2018 Best Paper Award”最佳论文奖;在Transportation Research Part C、IEEE TITS、中国公路学报等顶级期刊上发表SCI/EI论文40余篇,授权和申请国际发明专利6项,国家发明专利26项,授权软件著作权12项;主持国家自然科学基金面上项目、国家自然科学基金青年项目、陕西省青年科技新星人才项目、陕西省重点研发计划等项目共8项,参与国家重点研发计划项目、陕西省重点创新产业链项目等项目20余项。
图1 自主研发的“信达号”智能网联汽车平台 图2 无人驾驶汽车竞赛获奖证书 欢迎对无人驾驶平台研发(包括多源信息融合感知、高精度定位、智能决策与控制等关键技术)、智能网联汽车安全、车路协同管控、车联网、人工智能、大数据与数据挖掘等方向感兴趣的同学,报考本人的硕士研究生。 社会职务1、学术活动: 《IEEE Sensors Journal》Associate Editor副主编; 《International Journal of Transportation Science andTechnology》青年编委; 《中国公路学报》青年编委; 《交通运输工程学报》青年编委; 《无人系统技术》期刊青年编委; IEEE member; 中国计算机学会(CCF)会员; 中国人工智能学会(CCAI)会员。
2、著名期刊/会议审稿人: IEEE Transactions on Intelligent Transportation Systems IEEE Intelligent Transportation Systems Magazine IEEE Sensors Journal IEEE Systems Journal IET Intelligent Transportation Systems 中国公路学报 交通运输工程学报 吉大学报 无人系统技术 IEEE Conference on Intelligent Transportation Systems(ITSC) IEEE Intelligent Vehicles Symposium(IV) Transportation Research Board Annual Meeting(TRB) COTA International Conference of Transportation Professionals (CICTP) World Transport Conference (WTC) 研究领域本人长期从事自动驾驶、车路协同相关理论技术研究和工程实践应用,围绕高精度定位及导航、智能网联汽车故障诊断、网联协同控制等热难点科学问题开展系统研究。 (1)智能网联汽车高精度定位及导航 为解决智能汽车在隧道、城市峡谷等复杂环境下的高精度、高可靠定位问题,研究融合激光雷达(激光SLAM)、GNSS、视觉传感器(视觉SLAM)数据及地图数据的定位方法。提出了网联环境下考虑通信网络延时、邻居车辆数量和传感器测量不确定度等因素的协同定位框架和算法。
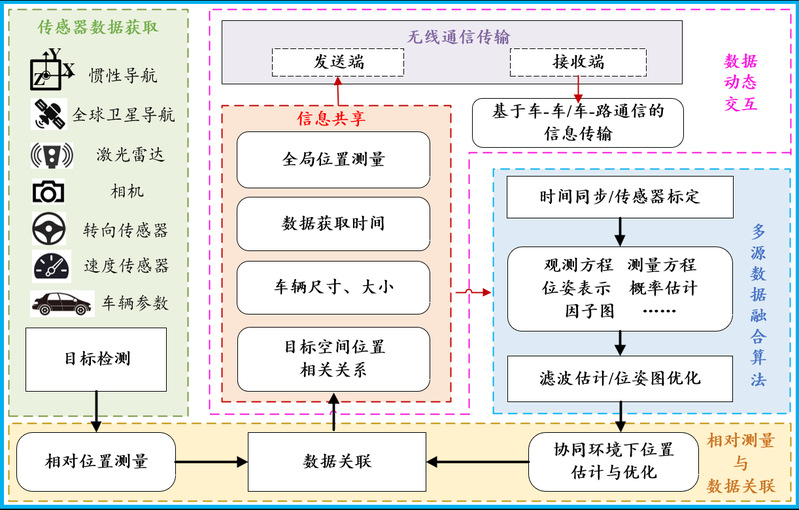
图1 多源传感器融合定位与网联协同定位 (2)智能网联汽车传感器故障诊断 针对智能汽车故障诊断,通过实时获取多源传感器数据,综合利用统计学方法、机器学习等方法检测传感器数据异常,提出相应的容错控制策略保证系统的可靠及安全。利用模型和数据驱动方法对智能汽车的状态进行精准预测,同时关注检测模型的可解释性。 (3)网联环境下车辆协同控制方法 图3 混合交通流仿真测试 开授课程
科研项目1. 国家自然科学基金面上项目:智能汽车定位系统测试,主持,; 2. 国家自然科学基金青年项目:复杂环境下智能汽车故障诊断,主持; 3. 陕西省创新人才推进计划项目-青年科技新星,主持; 4. 陕西省高校科协青年人才托举计划项目:智能网联汽车协同管控,主持; 论文[1] Haigen Min, Yukun Fang, Xia Wu, Xiaoping Lei, Shixiang Chen, Rui Teixeira, Bing Zhu, Xiangmo Zhao, Zhigang Xu, A fault diagnosis framework for autonomous vehicles with sensor self-diagnosis, Expert Systems with Applications, 2023,224:120002.(SCI收录,JCR一区) [2] Fang Yukun, Haigen Min*, Xia Wu, Xiaoping Lei, Shixiang Chen, Rui Teixeira, and Xiangmo Zhao.Toward interpretability in fault diagnosis for autonomous vehicles: Interpretation of sensor data anomalies. IEEE Sensors Journal, 23(5): 5014-5027.(SCI收录,JCR二区) [3] Wuqi Wang, Haigen Min*,Xia Wu, Xinmeng Hou, Yao Li, Xiangmo Zhao.High Accuracy and Low Complexity LiDAR Place Recognition using Unitary Invariant Frobenius Norm[J]. IEEE Sensors Journal, 23(11), 11205-11217. (SCI收录,JCR二区) [5] Fang Yukun, Min Haigen*, Wu Xia, et al. On-Ramp Merging Strategies of Connected and Automated Vehicles Considering Communication Delay[J]. IEEE Transactions on Intelligent Transportation Systems, 2021. (SCI收录,JCR一区) [6] Yukun Fang, Haigen Min*, Wuqi Wang, Zhigang Xu, Xiangmo Zhao. A Fault Detection and Diagnosis System for Autonomous Vehicles Based on Hybrid Approaches[J]. IEEE Sensors Journal, 20(16), 9359-9371. (SCI收录,JCR二区) [7] Min, H., Wu, X., Cheng, C., Zhao, X. Kinematic and Dynamic Vehicle Model-Assisted Global Positioning Method for Autonomous Vehicles with Low-Cost GPS/Camera/In-Vehicle Sensors[J]. Sensors 2019, 19, 5430.(SCI收录,JCR二区) [8] Min H, Fang Y , Wang R , et al. A Novel On-Ramp Merging Strategy for Connected and Automated Vehicles Based on Game Theory[J]. Journal of advanced transportation, 2020, 2020:1-11.(SCI收录,JCR三区) [9] Xu Z, Zhang K, Min H, et al. What drives people to accept automated vehicles? Findings from a field experiment[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 320-334. (SCI收录,JCR一区) [10] Zhao X, Min H, Xu Z, et al. Image Anti-blurring and Statistic Filter of Feature Space Displacement: Application to Visual Odometry for Outdoor Ground Vehicle[J]. Journal of Sensors, 2018:1-14.(SCI收录,JCR三区) [11] Zhigang Xu, Kaifan Zhang, Haigen Min, Zhen Wang, Xiangmo Zhao,Peng Liu. What drives people to accept automated vehicles? Findings from a field experiment[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 320-334. (SCI收录,JCR一区,IF6.077) [12] MIN, H., ZHAO, X., XU, Z., et al. Robust Features and Accurate Inliers Detection Framework: Application to Stereo Ego-motion Estimation[J]. KSII Transactions on Internet and Information Systems, 2017, 11(1): 302-320.(SCI收录,JCR四区) [13] Haigen Min, Yukun Fang, Xia Wu, Guoyuan Wu, Xiangmo Zhao*, On-ramp merging strategy for connected and automated vehicles based on complete information static game[J],Journal of Traffic and Transportation Engineering (English Edition), 2021, 8(4):582-595.(EI收录) [14] Min H G, Li X C, Sun P P, et al. Visual odometry for on-road vehicles based on trifocal tensor[C]// Smart Cities Conference. IEEE, 2015:1-5.(EI收录) [15]闵海根,李尧,汪建球,张磊,李杰,童星,吴霞,赵祥模. 考虑通信时延的智能网联汽车协同定位方法. 中国公路学报. 2023,(6):220-234. [16] 闵海根, 方煜坤, 吴霞, 徐志刚, 赵祥模. 弱GNSS信号下基于EMD和LSTM的车辆位置预测方法研究[J]. 中国公路学报, 2021, 34(7): 128-139.(EI收录) [17] 闵海根, 赵祥模, 徐志刚,等. 基于稳健特征点的立体视觉测程法[J]. 上海交通大学学报, 2017, 51(7):870-877.(EI收录) [18] 孙朋朋, 赵祥模, 徐志刚, 闵海根. 基于3D激光雷达城市道路边界鲁棒检测算法[J]. 浙江大学学报(工学版), 2018(3).(EI收录) [19] 闵海根,方煜坤,吴霞,等. 基于自动编码器和长短时记忆网络的智能汽车故障诊断方法研究[J]. 四川大学学报:自然科学版, 2021,58:053003. [20] 闵海根,杨一鸣,王武祺,等. 基于深度确定性策略梯度的队列纵向协同控制策略[J]. 长安大学学报(自然科学版), 2021, 41(4):90-100. 科技成果国家发明专利: [1] 发明专利(CN202011134946.9):赵祥模,方煜坤,闵海根,徐志刚,吴 [2] 发明专利(ZL201410239892.0):赵祥模,闵海根,常志国,侯龙伟,徐志刚. 一种公交客流自动计数方法及自动计数系统。 [3] 发明专利(ZL201410841099.8):赵祥模,徐志刚,闵海根,张立成,周经美,杨澜,康俊民,孟凡林,尚旭明,赵佳乐,刘慧琪,王振. 基于激光雷达和双目相机的车前行人检测方法及系统。 [4] 发明专利(ZL201510169963.9):赵祥模,周经美,程鑫,徐志刚,张立成,王润民,闵海根,王振. 一种基于手机图像匹配的室内定位方法。 [5] 发明专利(ZL201210257591.1):刘占文,赵祥模,王润民,高涛,徐志刚,刘昇,杨楠,闵海根,周经美,张立成,沈超,王姣姣. 一种基于加权割合并的图像层次分割方法。 [6] 发明专利(ZL 201310578627.0):赵祥模,徐志刚,李娜,尚旭明,孟凡林,赵佳乐,刘慧琪,闵海根.一种基于不同焦距视频图像融合的交通状态识别方法。 [7] 发明专利(ZL201610529212.8):赵祥模,徐志刚,孙朋朋,闵海根,李骁驰,王润民,吴霞. 一种基于多线激光雷达的3D点云分割方法。 [8] 发明专利(CN201810667814.9):赵祥模,王润民,孙朋朋,王召月,徐志刚,袁绍欣,闵海根,李骁驰. 一种基于3D激光雷达及V2X的网联车定位方法。 [9] 发明专利(CN201610835508.2):赵祥模,孙朋朋,徐志刚,王润民,闵海根,李骁驰,王振,吴霞. 一种基于三维激光雷达的地面点云分割方法。 [10] 发明专利(CN201610981078.5):赵祥模,孙朋朋,徐志刚,李骁驰,闵海根,吴霞. 一种道路边界检测及跟踪方法。 [11] 发明专利(CN201610980691.5):赵祥模,李骁驰,徐志刚,王润民,张立成,闵海根,孙朋朋,王振. 面向最大交付能力的车载异构网络垂直切换方法。 [12] 发明专利(CN201711071689.7):赵祥模,李骁驰,徐志刚,王振,王润民,闵海根,孙朋朋. 连接设备及数据传输方法。 [13] 发明专利(CN201610981545.4):赵祥模,徐志刚,李骁驰,张立成,王润民,闵海根,孙朋朋,李楠,王振,胡锦超. 基于冲突检测下QoS保障的车联网电子交通标识广播方法。 实用新型专利: [1] 实用新型专利(ZL201920786357.5):闵海根,杨一鸣,赵祥模,任大凯,曾峰,徐志刚,王润民,孙朋朋,王振,程超轶,刘佳琳,方煜坤. 自动驾驶车辆控制器。 [2] 实用新型专利(ZL201921037928.1):赵祥模,任大凯,闵海根,曾峰,汪贵平,徐志刚,杨一鸣,孙朋朋,王润民,王由道,程超轶,刘佳琳,方煜坤,王振. 无人车电源系统及无人车。 [3] 实用新型专利(ZL201920784716.3):赵祥模,闵海根,汪贵平,徐志刚,杨一鸣,孙朋朋,任大凯,曾峰,龚思远,王润民,田彬,程超轶,刘佳琳,方煜坤. 自动驾驶车辆队列控制器。 软件著作权: [1] 智能汽车传感器故障诊断软件(2021SR0523347) [2] 高速公路智能行车诱导系统监控软件. (登记号:2019SR0407234) [3] 基于物联网的高速公路智能诱导标控制软件. (登记号:2019SR0167845) [4] 基于虚拟场景的智能汽车车道保持测试软件. (登记号: 2019SR0703646) [5] 基于视觉的车流量自动监测系统. (登记号:2017SR489897) [6] 基于相机与激光雷达的车辆识别系统. (登记号:2017SR465947) [7] 基于视觉信息的机器人运动恢复结构软件. (登记号:2016SR153439) [8] 基于SURF算法的移动机器人自定位软件. (登记号:2015SR063744) [9] 车辆车牌信息识别系统. (登记号:2015SR189169) [10] 基于双目相机的三维测量软件. (登记号:2015SR061343) [11] 基于双目视觉的三维空间中运动目标轨迹重建软件. (登记号:2014SR020287) 荣誉奖励个人荣誉: [1] 2025年1月,三秦英才特殊支持计划青年拔尖人才; [2] 2023年1月,陕西省创新人才攀登工程青年科技新星; [3] 2020年9月,陕西省高校青年人才托举计划入选者。 比赛获奖: [1] 2024年12月,2024中国数字汽车大赛(创业组)全国“特等奖”(第1指导教师); [2] 2024年12月,2024中第十届中国研究智慧城市技术与创意设计大赛全国“二等奖”(第1指导教师); [3] 2024年12月,第六届全球校园人工智能算法精英大赛全国总决赛“一等奖”(第1指导教师); [4] 2024年11月,第六届全球校园人工智能算法精英大赛省级选拔赛“二等奖”(第1指导教师); [5] 2024年10月,第六届中国研究生人工智能创新大赛全国“二等奖”(第1指导教师); [6] 2023年9月,中国国际大学生创新创业大赛陕西赛区“银奖”(第1指导教师); [7] 2023年8月,第十八届中国研究生电子设计竞赛全国总决赛“优秀指导教师”; [8] 2023年8月,第十八届中国研究生电子设计竞赛全国总决赛团队“一等奖”(第1指导教师); [9] 2023年8月,第一届陕西省大学生交通科技大赛“一等奖”(第1指导教师); [10] 2023年8月,第一届陕西省大学生交通科技大赛“优秀指导老师”; [11] 2023年7月,第十八届中国研究生电子设计竞赛西北赛区“一等奖”(第1指导教师); [12] 2023年7月,第十八届中国研究生电子设计竞赛西北赛区“优秀指导老师”; [13] 2023年9月,第九届中国国际互联网+大学生创新创业大赛陕西赛区“银奖”(第1指导教师); [14] 2022年6月,2022世界智能驾驶挑战赛智能网联挑战赛“金奖”(第1指导教师); [15] 2021年5月,2021世界智能驾驶挑战赛“华为MDC杯”极限挑战赛“银奖”(第1指导教师); [16] 2021年08月,第七届中国国际“互联网+”大学生创新创业大赛陕西赛区“银奖”(第1指导教师); [17] 2021年07月,第十三届“挑战杯”陕西省大学生课外学术科技作品竞赛校企联合专项赛陕西省赛“二等奖”(第1指导教师); [18] 2019年12月,陕西省2019年高等教育教学成果奖“特等奖”,面向智能汽车产业链,建多学科交叉融合大团 队大平台,培养拔尖创新人才(排名第九); [19] 2019年08月,2019年大学生物联网设计竞赛“全国三等奖”(第1指导教师); [20] 2019年05月,陕西省第五届研究生创新成果展“一等奖”(第1指导教师); [21] 2018年07月,A New Video-based Ego-positioning Method and Its Application on Vehicle Parking Guidance. The 18th COTA International Conference of Transportation Professionals.(CICTP2018 Best Paper Award); [22] 2018年8月,i-VISTA自动驾驶挑战赛自动驾驶城市交通场景挑战赛“优胜奖”; [23] 2018年8月,i-VISTA自动驾驶挑战赛自动驾驶商业化进程挑战赛“三等奖”; [24] 2018年8月,i-VISTA自动驾驶挑战赛自动驾驶创新应用挑战赛“最佳技术奖”; [25] 2017年12月,2017中国智能汽车大赛无人驾驶组“优秀奖”; [26] 2017年12月,2017中国智能汽车大赛无人驾驶组“最佳创新奖”; [27] 2017年9月,第三届中国“互联网+”大学生创新创业大赛全国总决赛“银奖”; [28] 2017年7月,2017世界智能驾驶挑战赛无人驾驶组“领先奖”。 工作经历2024年12月 - 至今,长安大学,信息工程学院,教授(破格),博士生导师 |